Лабораторные
работы
по
робототехнике
(4
класс)
Учитель информатики и
робототехники:
Божанова Нургуль
Аскаргазыевна
2021-2022
учебный год
Введение
Робот
(чеш. robot,
от robota —
«подневольный
труд») — автоматическое устройство,
предназначенное для осуществления различного рода механических
операций, которое действует по заранее
заложенной программе.
Слово «роботика» (или
«роботехника», «robotics») было впервые
использовано в печати Айзеком Азимовым в
научно-фантастическом рассказе «Лжец», опубликованном в 1941 году.
В основу слова «робототехника» легло слово
«робот», придуманное
в 1920 г. чешским писателем Карелом
Чапеком и его
братом Йозефом для научно-фантастической пьесы
Карела Чапека «Р. У. Р.» («Россумские универсальные роботы»),
впервые поставленной в 1921 г. и пользовавшейся успехом у
зрителей.
Задача сборника лабораторных работ – научить
учеников программировать их под определенные задачи, разобрать с
базовые решения наиболее распространенных задач-соревнований в мир
робототехники с помощью конструктора Lego mindstorms.
Программирование роботов объясняется на примере среды разработки
Lego mindstorms EV3.
Лабораторная работа
№1
Тема:
«Изучаем датчик цвета. Определение
цвета»
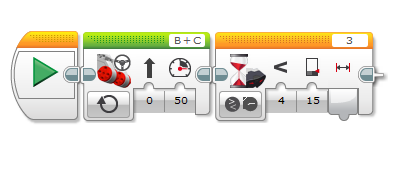
Открой
программу LEGO MINDSTORMS Education EV3. Следуя
инструкциям, собери робота. Установи датчик цвета и
загрузи программу.
-
Присоедини
блок Рулевое управление к
блоку СТАРТ. Поменяй на
режим Включить. Мощность
поставь равной 40.
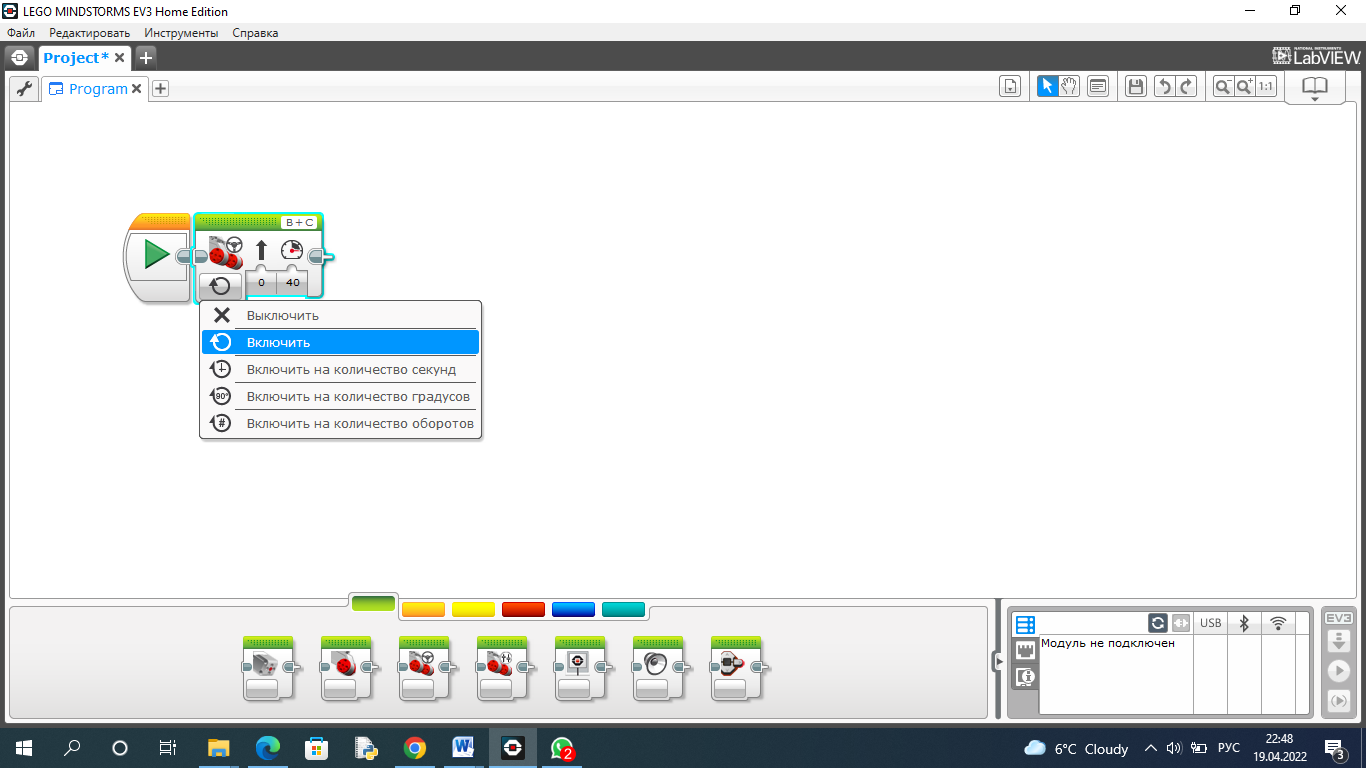
Рисунок.
1
-
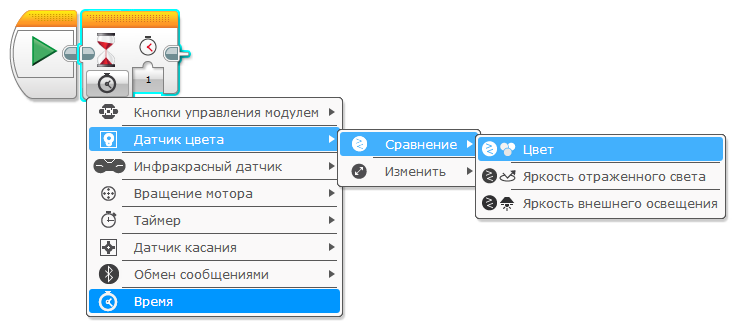
Добавь к
блоку Рулевое управление блок Ожидание. Измени режим
датчика для получения информации: Датчик цвета ⇒ Сравнение ⇒ Цвет.
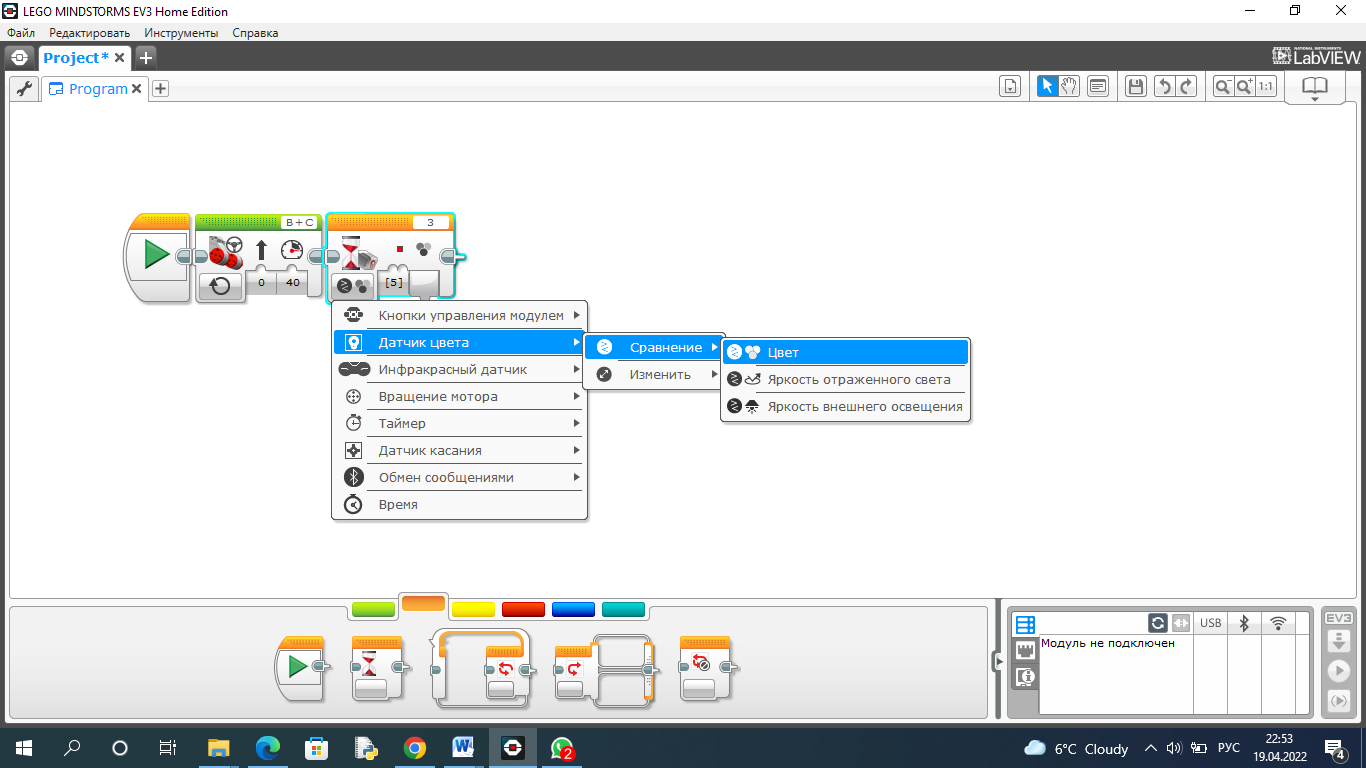
Рисунок.
2
-
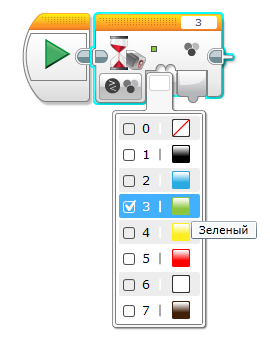
В первичный
параметр блока помести красный цвет. 
Рисунок.
3
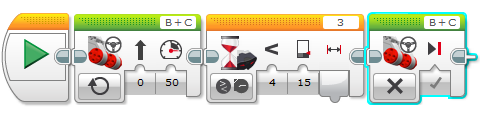
-
Добавь к блоку
Ожидание еще один блок Рулевое управление. Подключи
режим Выключить, чтобы
остановить двигатели, когда датчик обнаружит красный
цвет.
-
Загрузи готовую
программу на робота.
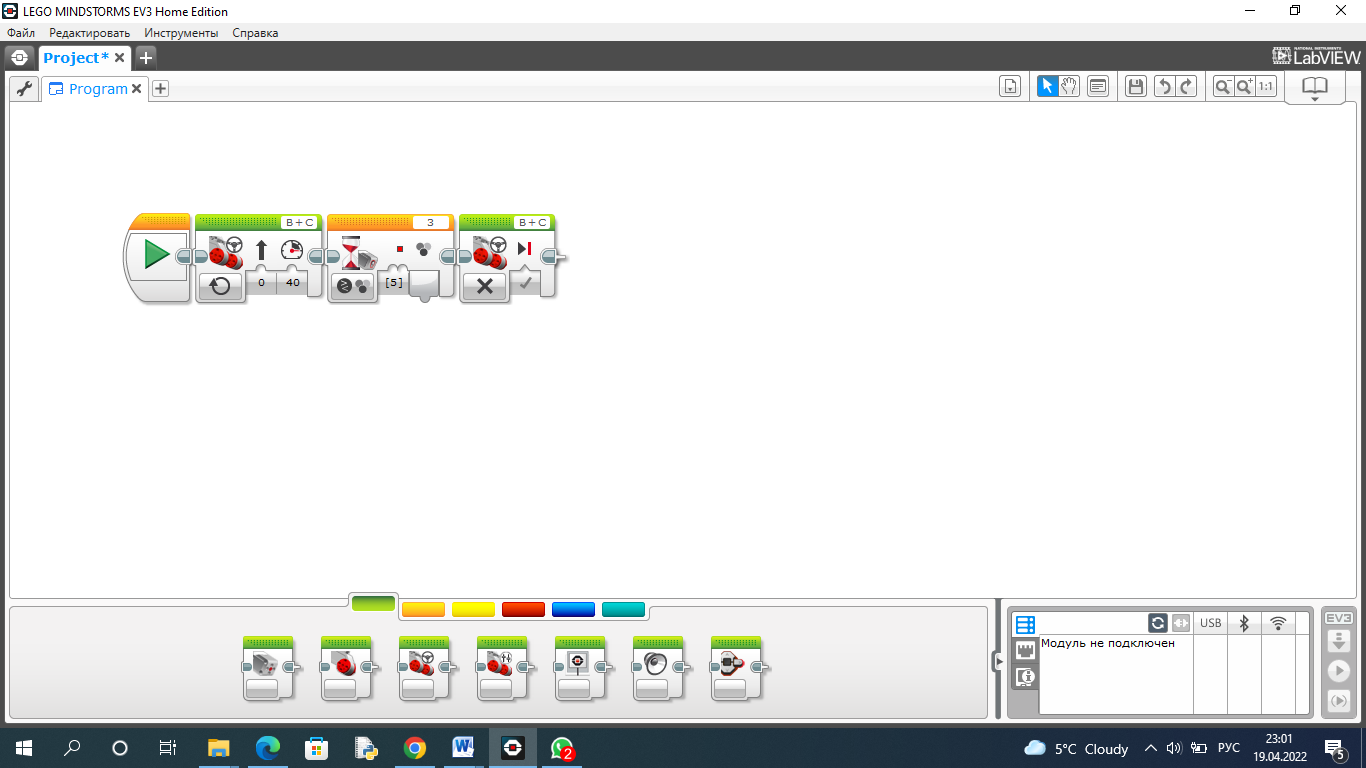
Рисунок.
4
Лабораторная работа
№2
Тема:
«Создание робота-светофора»
 Всем известно,
что светофор имеет три цвета: зеленый, желтый, красный. Поэтому для
того, чтобы создать робот-светофор, нам нужен робот EV3,
в
Всем известно,
что светофор имеет три цвета: зеленый, желтый, красный. Поэтому для
того, чтобы создать робот-светофор, нам нужен робот EV3,
в
котором
находится датчик цвета.
Для этого как
обычно обратимся к руководству пользователя LEGO MINDSTORMS
Education EV3, затем создадим в этой программе проект
Робот-светофор.
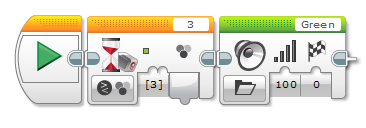
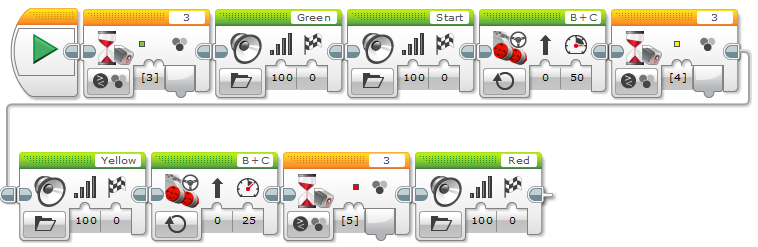
В этом задании
при обнаружении зеленого цвета Робот-светофор сообщает «Green» и двигается
вперед. Обнаружив желтый цвет, сообщает
«Yellow»
и уменьшает скорость, а при обнаружении
красного цвета сообщает «Red» и
останавливается.
-
К
блоку СТАРТ добавь блок
Ожидание. Измени режим датчика для получения
информации: Датчик цвета ⇒ Сравнение ⇒ Цвет.
-
В параметр
блока размести зеленый цвет.
-
К
блоку Ожидание добавь
блок Звук. В параметрах
блока Звук размести
сообщение «Green».

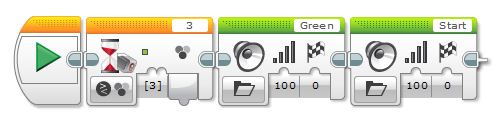
-
К
блоку Звук добавь еще один
блок Звук. В его
параметрах выбери режим «Start».
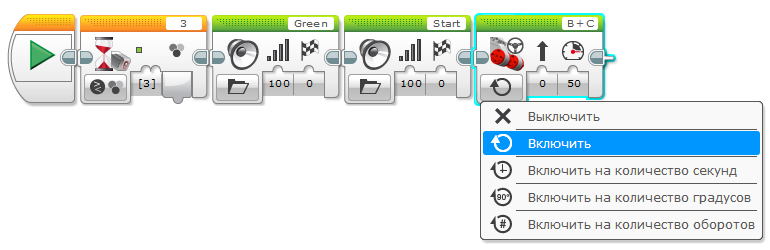
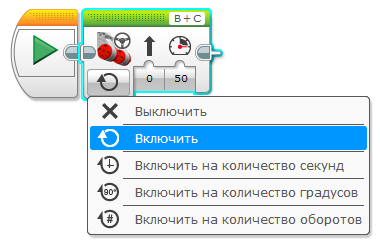
-
К последнему
блоку Звук добавь
блок Рулевое управление и поменяй
его на режим Включить. Измени
мощность на 50.
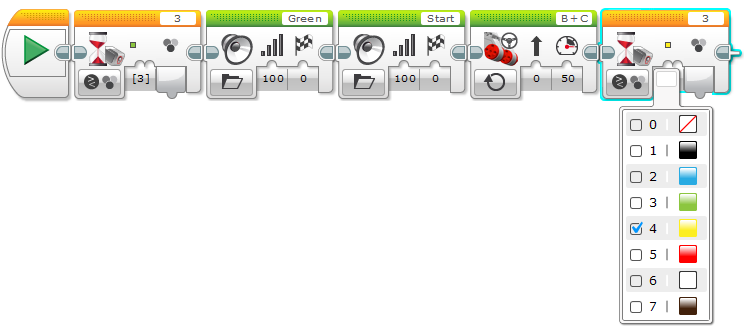
-
К
блоку Рулевое управление добавь
блок Ожидание. Измени режим
датчика для получения информации: Датчик цвета ⇒ Сравнение ⇒ Цвет. В параметр
блока размести желтый цвет.
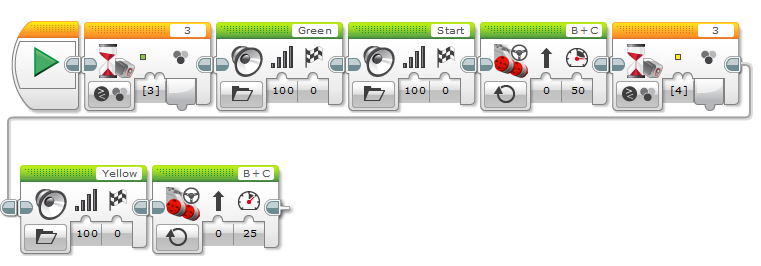
-
К
блоку Ожидание добавь
блок Звук. В параметре
блока Звук размести
сообщение «Yellow».

-
К
блоку Звук добавь
блок Рулевое управление и поменяй
его на режим Включить. Измени
мощность на 25.
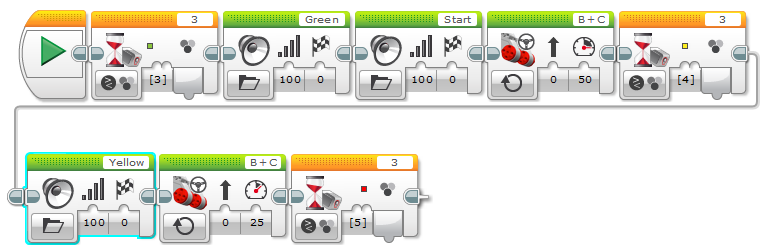
-
К
блоку Рулевое управление добавь
блок Ожидание. Измени режим
датчика для получения информации: Датчик цвета ⇒ Сравнение ⇒ Цвет. В параметр
блока размести красный цвет.
-
К
блоку Ожидание добавь
блок Звук. В параметрах
блока Звук размести
сообщение «Red».
-
К
блоку Звук добавь еще один
блок Звук. Выбери в его
параметрах режим «Stop».
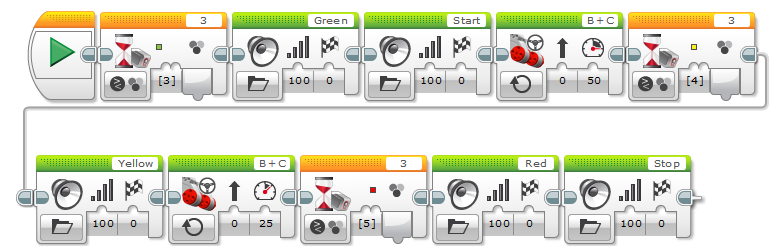
-
К последнему
блоку Звук добавь
блок Рулевое управление и поменяй
его на режим Выключить.
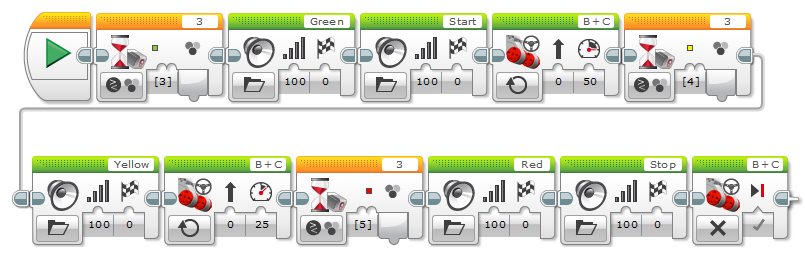
-
Загрузи
программу на робота.
Лабораторная работа
№3
Тема:
«Остановка на расстоянии 15 см от стены или
препятствия»
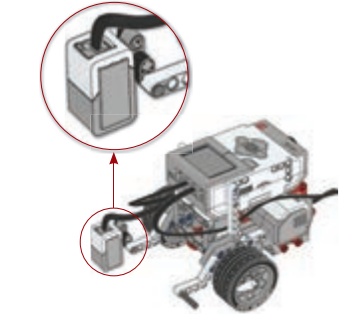
 Для работы с
использованием ультразвукового датчика нам необходимо собрать
робота, как показано на рисунке. Чтобы собрать робота без ошибок,
открой программу LEGO MINDSTORMS Education EV3 для
учащихся.
Для работы с
использованием ультразвукового датчика нам необходимо собрать
робота, как показано на рисунке. Чтобы собрать робота без ошибок,
открой программу LEGO MINDSTORMS Education EV3 для
учащихся.
Для этого мы
используем знакомый нам блок программы Ожидание оранжевого цвета и переведем его в
режим: Ультразвуковой датчик⇒ Сравнение⇒ Расстояние в
сантиметрах.
-
Начать движение
вперед. К блоку СТАРТ добавь
блок Рулевое управление. Поменяй
режим на Включить. Установи
мощность 50.
-
Дождаться, пока
значение ультразвукового датчика не станет меньше 15 см. К
блоку Рулевое управление добавь
блок Ожидание. Для получения
информации с датчика измени его режим: Ультразвуковой датчик
⇒ Сравнение ⇒ Расстояние в сантиметрах. Установи число 15 как пороговое
значение.
-
Для остановки
движения к блоку Ожидание добавь
блок Рулевое управление. Для
выключения моторов подключи режим Выключить.
-
Загрузи готовую
программу на робота.

 21 Сәуір 2022
21 Сәуір 2022 334
334 1 рет жүктелген
1 рет жүктелген

 Дайын ҚМЖ. Барлық пәндерден 2022-2023 оқу жылына, жаңа бұйрыққа сай жасалған
Дайын ҚМЖ. Барлық пәндерден 2022-2023 оқу жылына, жаңа бұйрыққа сай жасалған