ЖИ көмекші
ЖИ көмекші


жүктеу мүмкіндігіне ие боласыз
Бұл материал сайт қолданушысы жариялаған. Материалдың ішінде жазылған барлық ақпаратқа жауапкершілікті жариялаған қолданушы жауап береді. Ұстаз тілегі тек ақпаратты таратуға қолдау көрсетеді. Егер материал сіздің авторлық құқығыңызды бұзған болса немесе басқа да себептермен сайттан өшіру керек деп ойласаңыз осында жазыңыз
 07 Қараша 2021
07 Қараша 2021 1270
1270
Ғылыми жоба
Қазақстан Республикасы Білім және Ғылым министрлігі Алматы облысы Талғар ауданы

Есен Мирас
"Алматы облысы білім басқармасының Талғар ауданы бойынша білім бөлімі" мемлекеттік мекемесінің "№23 мектеп жасына дейінгі шағын орталығы бар жалпы білім беретін орта мектебі" коммуналдық мемлекеттік мекемесісінің 9 «г» сыныбы оқушысы
Тақырыбы:
Роботехника
«Сервожетектермен жұмыс істейтін өрмекші – роботты жобалау»
Тема:
«Конструкция робота-паука, работающего с сервоприводами»
Theme:
"Construction of a servo-powered spider robot"
Бағыты: Информатика
Жетекшісі: Катаев М.К
"Алматы облысы білім басқармасының Талғар ауданы бойынша білім бөлімі" мемлекеттік мекемесінің "№23 мектеп жасына дейінгі шағын орталығы бар жалпы білім беретін орта мектебі" коммуналдық мемлекеттік мекемесісінің информатика пәнінің мұғалімі
Талғар 2021
АҢДАТПА
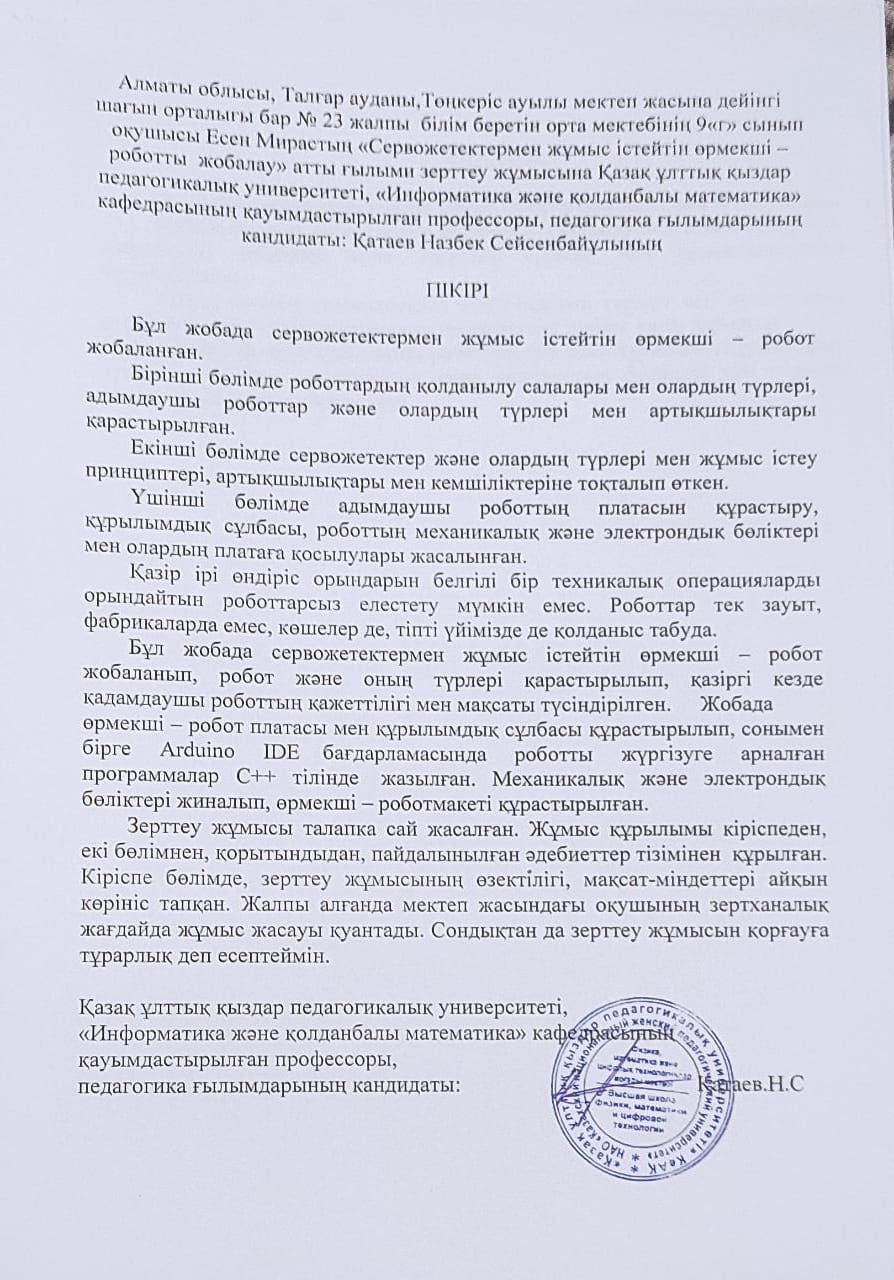
Бұл жобада сервожетектермен жұмыс істейтін өрмекші – робот жобаланды.
Бірінші бөлімде роботтардың қолданылу салалары мен олардың түрлері, адымдаушы роботтар және олардың түрлері мен артықшылықтары қарастырылған.
Екінші бөлімде сервожетектер және олардың түрлері мен жұмыс істеу принциптері, артықшылықтары мен кемшіліктері жайлы қарастырылған.
Үшінші бөлімде адымдаушы роботтың платасын құрастыру, құрылымдық сұлбасы, роботтың механикалық және электрондық бөліктері мен олардың платаға қосылулары жасалынған.
АННОТАЦИЯ
В этом дипломном проекте проектирован робот – паук на сервоприводах.
В первой части просмотрены роботы и их виды, шагающие роботы, их виды и преимущества.
Во второй части просмотрены сервоприводы, их виды и принципы, преимуществах и недостатках.
В третьей части сделаны плата робота – паука, схема, подключение механических и электронных частей робота к плате.
ABSTRACT
In this thesis project is designed robot - spider on the servo.
In the first part viewed robots and their views, walking robots, their types and advantages.
In the second part servo drives, their types and principles of operation, advantages and disadvantages.
The third part of the payment made by a robot - a spider diagram connection of mechanical and electronic parts of the robot to the board.
МАЗМҰНЫ
-
-
КІРІСПЕ
5
Адымдаушы роботты қарастыру
6
Роботтардың тағайындалуы және қолданылу салалары
6
Қозғалатын роботтардың түрлерін салыстыру және талдау
8
Адымдаушы роботтар
9
Адымдаушы роботтардың түрлері
8
Робот аяқтарының конструкциясының типтері
9
Тұрақтандыру принципі
9
Робот қозғаласының алгоритмдері
11
Бейімделмеген қозғалыс
12
Тұрақтандырушысы бар бейімделмеген қозғалыс
12
Бейімделген қозғалыс
14
Техналогиялық бөлім
15
Сервожетек
15
Сервожетектің түрлері
16
Сандық және аналогтық сервожетектердің айырмашылықтары
17
Сервожетекті адымдаушы қозғалтқыштармен салыстыру
19
Сервожетектің жұмыс істеу принципі
21
Конструкторлық бөлім
21
Мобильді робот платасын құрастыру
22
Мобильді роботтың жалпыланған құрылымдық сұлбасын жасау
24
Atmega328 микроконтроллеріне қысқаша шолу
26
Роботтың бөлшектері
27
Роботтың механикалық бөлiгi
27
Электрондық бөлік
28
ҚОРЫТЫНДЫ
ПАЙДАЛАНЫЛҒАН ӘДЕБИЕТТЕР ТІЗІМІ
ҚОСЫМША А
ҚОСЫМША Б
ҚОСЫМША В
ҚОСЫМША Г
-
КІРІСПЕ
Бұл жобаның мақсаты – төрт аяқты, сервожетектермен жұмыс істейтін өрмекші – роботты жобалау болып табылады. Қазіргі техникалық прогресс уақытында өндірістік орындар толық автоматтандырып, қамтылуда. Өндіріс орындарында роботтар маңызды рөл атқаруда. Қазіргі таңда үлкен өндіріс орындарындағы белгілі бір техникалық операцияларды орындайтын роботтарсыз елестете алмаймыз. Сонымен қатар роботтар тек қана зауыттарда және фабрикаларда ғана емес, көшелер де, тіпті үй тұрмысында да қолданыс табуда.
Робот – бұл автоматты машина болып табылады, яғни, дайын бағдарлама бойынша басқарылатын құрылғы және қызмет көрсету барысында адамға қатысты немесе өзге де әрекеттердің орындалуын қамтамасыз етеді. Ең заманауи робот өздігінен және кешенді түрде қоршаған ортаға бейімделіп, кейбір қызметтерді орындап, белгілі бір мақсаттағы тапсырмаларды өздігінен басқара алатын машина болып табылады. Басқару жүйесі техникалық деңгей, көрсеткіштер мен ақпараттық қамсыздандыру, атқарушы органдармен қамтамасыз етілгендіктен, бұл кең ауқымды робот машина класын құрайды. Бұл машиналар әр түрлі операцияларды орындау үшін арналған. Роботтың жалпы көрсеткіші бұл бағдарлама бойынша қарастырылған кез келген әрекетті тез және автоматты түрде орындау мүмкіндігі болып табылады.
Роботтардың түрлері өте көп. Қозғалуы бойынша роботтар жылжитын және жылжымайтын болып бөлінеді. Бұл жобада адымдап жылжитын роботтарды қарастырамыз.
Қазіргі таңда адымдаушы роботтар әлемдегі ең танымал зерттеу нысаны болып табылады. Себебі адымдаушы роботтардың дөңгелекті және шынжыр табанды роботтармен салыстырғанда артықшылықтары бар. Көбіне адымдаушы роботтар қиын бедерлі, жұмсақ топырақты жерлерде қолданылады. Қиын бедерлі жерлерде жүру үшін роботтар бейімделгіш болуы қажет.
-
шұңқырлары бар жолдарды өте алу мүмкіндігі;
-
бір орында айнала алу мүмкіндігі- аяқтарының бекітілу жерлеріне дейінгі биіктіктегі кедергілерді өте алу мүмкіндігі;
-
кез-келген бағытта қозғалыс жасай алу мүмкіндігі;
-
кедір-бұдыр жерлерде тепе-теңдікті ұстау мүмкіндігі.
Роботтытехниканың ерекше бөлімін адымдаушы қозғалу жүйелері және оларға негізделген адымдаушы роботтар құрайды. Адымдаушы робот жүйелерінің белгілері мен потенциалдық қолданылу облысы роботтытехниканың шегінен шығады. Аяқ көмегімен қозғалу тәсілі (адым басу, жүгіру, секіру) тірі табиғатта кең тараған. Техникада оны басқару қиындығына байланысты кең қолданыс таппаған. Адымдаушы әдіс алдын-ала дайындалған кедергілері бар жермен қозғалу кезінде айқын көрінді. Адымдаушы тәсілде жер аз бұзылады. Қандай да бір қозғалыс кезінде тұрақты күйде болуы үшін үш нүктеде тіректері болуы керек. Адам сияқты орнықты қозғала алатын мобильды
роботтарды жобалау көп қиындықтармен түйіседі және олардың негізгісі екі сияқты адымдаушы жабдықтың динамикалық орнықтылық қамтамасыз ететін әдістерді табу болып табылады.
Бұл жобаның басты мақсаты: сервожетектермен жұмыс істейтін төрт аяқты өрмекші – роботты жобалау, Arduino бағдарламасы арқылы басқару.
Адымдаушы роботтың басқару жүйесінің міндеттері:
-
қозғалыс кезінде жергілікті рельефке тәуелсіз, жерден белгілі бір биіктікте,кеңістікте толық корпусының жағдайын тұрақтандыру;
-
кедергілерді айналып өтіп, белгілі маршрутпен қозғалысты қамтамасыз
ету;
-
жергілікті рельефке бейімделуі бар белгілі жүрісті іске асыратын аяқпен
байланыстырылған басқару.
Адымдаушы роботтардың негізгі мақсаты қиын бедерлі жерлермен қозғалу болғандықтан, оларды басқару міндетті түрде бейімделген болады.
Қарастырылатын негізгі тапсырмалар:
− тақырыптың қазіргі кезде практика жүзінде қажеттілігін және мақсатын түсіндіру;
− сервожетек және оның жұмыс істеу принциптерін қарастыру;
− өрмекші – роботтың құрылымдық сұлбасы, негізгі бөлшектері, қолданысы туралы мағлұматтар;
-
Адымдаушы роботты қарастыру
-
Роботтардың тағайындалуы және қолданылу салалары
Енгізілген бағдарламаларды орындайтын адамның механикалық көмекшісі бұл робот деп аталады. Яғни, қоршаған ортамен байланысқан кезінде адамның қызметтерін жартылай немесе толықтай орындайтын машина.
Робот – берілген күрделі операцияларды орындайтын автомат. Қазіргі техникалық прогресс уақытында өндірістер толық автоматтандырылуда. Өндіріс орындарында роботтар өте маңызды рөл атқаруда. Қазіргі үлкен өндіріс орындарын белгілі бір техникалық операцияларды орындайтын роботтарсыз елестете алмаймыз. Роботтар тек қана зауыттарда және фабрикаларда емес, көшелер де, тіпті өз үйімізде де қолданыс табуда.
Жалпы роботтардың түрлері өте көп. Олар өлшемдері бойынша, сыртқы пішімдері мен атқаратын қызметтері бойынша, және бағдарламалы логикаларының типтері және т.б. бойынша бөлінеді. Роботтардың қозғалуы бойынша олар: жылжитын және жылжымайтын болып бөлінеді. Бұл жұмыста адымдап қозғалатын роботтарды қарастырып өтеміз.
Роботтарды қолданылу салалары мен тағайындалуы бойынша жіктеуге болады:
-
манипуляциялық;
-
информациялық;
-
мобильді;
-
роботтар-экзоскелетондар.
Роботтардың кең тараған түріне – манипуляциялық роботтар жатады. Оларға өнеркәсіптік роботтар және экстремалды орта үшін арналған роботтармен қатар медициналық және тұрмыстық роботтарды келтіруге болады. Өндіріс саласында қолданылатын өнеркәсіптік роботтарды тасымалдау, суық штамповка, механикалық өңдеу, пісіру, құрастыру, бояу және тиеп-түсіру, лазерлі өңдеумен қатар сол сияқты технологиялық операцияларда қосымша және негізгі жүйелерді орындау барысында қолданады. Өнеркәсіптік роботтар тағайындалуы бойынша: технологиялық, көтеріп-тасымалдау және әмбебап деп үш топқа бөлінеді.
Экстремалды ортада жұмыс жасайтын роботтарға адамдардың өмірі үшін қауіпті жерлерде жұмыс жасайтын роботтарды келтіруге болады. Мысалы, радиоактивті немесе жарылу қауіпі бар материалдармен жұмыс жасайтын робот
-
өрт сөндіруші. Ғарыштық роботтар ғарыштық аппараттарды түйістіруді, жасанды спутниктерді буксирлеу және ұстау, жеке блоктарды ауыстыру, үлгілерді және грунтты жинау сияқты жұмыстарды орындайды. Суасты роботтары авариялы-құтқару жұмыстарын орындайды және суасты мұнай скважиналарының жабдықтарын жөндеу және қызмет ету үшін, су астында орындалатын жұмыстарды және суастындағы пайдалы қазбаларды бақылау және алу үшін арналған жұмыстарды орындайды. Жоғарыда аталып өткен мехатрондық құрылғылардан басқа медицинада аса дәлдікпен орындалатын
опрецияларды және аз кесілетін операцияларды орындау үшін роботтар қолданылады. Күтуші роботтар деп аталынатын роботтар кемтар науқастарға әртүрлі қарапайым функцияларды: денені бұру, радионы қосу және басқа да қозғалыстарды орындауға мүмкіндік береді. Тұрмыстық роботтарға үйшаруасы- роботын, әртүрлі антропоморфты ойыншықтарды, сонымен қатар жарнамалық мақсатта және басқа мақсаттарда қолданылатын роботтарды келтіруге болады.
Роботтардың басқа класы – ақпараттық роботтар, ғарышта, су асты, жер астында қолданылатын аппараттардан тұрады. Бұл роботтардың негізгі тағайындалуы қоршаған орта жайлы ақпарат алу және беру болып табылады. Ақпаратты роботтардың негізгі ерекшелігі супервизорлы басқарылуы бар. Бұнда операция автоматтандырылған түрде жасалады, тек бір операциядан екіншіге өтуді супервизор қызметін атқаратын оператор, роботтың әрекетін бақылап, қимыл стратегиясын жасап шығарады.
Болашағы бар роботтар мобильді класқа жататын роботтар болып табылады. Бұл роботтар әртүрлі қозғалтқыштар көмегімен орын ауыстырады және осы қозғалтқыш түріне байланысты олар: адымдаушы, дөңгелекті, шынжыр табанды болып бөлінеді.
Бөлек класқа экзосүлделі роботтарды бөлуге болады – олар адамның қол- аяқ функцияларын ауыстыру және күшейту үшін қолданылады. Оларға әртүрлі ортопедикалық құрылғылар, жасанды аяқ-қолдар, протездер жатады.
-
Қозғалатын роботтардың түрлерін салыстыру және талдау
Жермен қозғалатын роботтар үшін жер бедері, сыртқы күштердің әсері, жылдамдық негізгі шарттар болып табылады.
Қазіргі таңда қозғалатын роботтардың келесідей түрлері бар:
-
дөңгелекті және шынжыр табанды роботтар;
-
адымдаушы роботтар;
-
гибридті (дөңгелек және аяқ-қол);
-
мамандандырылған (мысалы, жылан тәріздес).
Дөңгелекті және шынжыр табанды роботтарда қозғалыс әдісі ретінде дөңгелекті қолданады. Бұл әдіс арқылы өте жоғары жылдамдық алуға және түзу жолдарда жүріс траекториясын оңай өзгертуге болады. Түзу емес жолдарда жүре алмайтындығы кемшілігі болып табылады. Шынжыр табанды роботтар жүріс траекториясын тез өзгерте алмайды, бірақ бір орында тұрып айнала алады. Биіктіктен құлау өткір және кедергінің биіктігі дөңгелек диаметрінің үштен бірінен үлкен болса, кедергіден өту қиындайды.
Артықшылықтары:
-
жоғары жылдамдық көрсеткіштері;
-
жүріс траекториясын тез өзгерту мүмкіндігі;
-
жүрістің байсалдылығы мен біркелкілігі;
-
бір орында айналу мүмкіндігі. Кемшіліктері:
-
шұңқырлары бар жолдарды өтудегі қиындықтар;
-
кедергінің биіктігі дөңгелек диаметрінің үштен бірінен үлкен кезінде кедергіден

 Жүктеу
Жүктеу


 Жүктеу
Жүктеушағым қалдыра аласыз


 Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген
Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген