 ЖИ көмекші
ЖИ көмекші






5 сынып 21 сабақ. Бұрылыстар. 3-бөлім бойынша қорытынды тапсырмалар. БЖБ 3

 Жүктеу
Жүктеу
#1 слайд
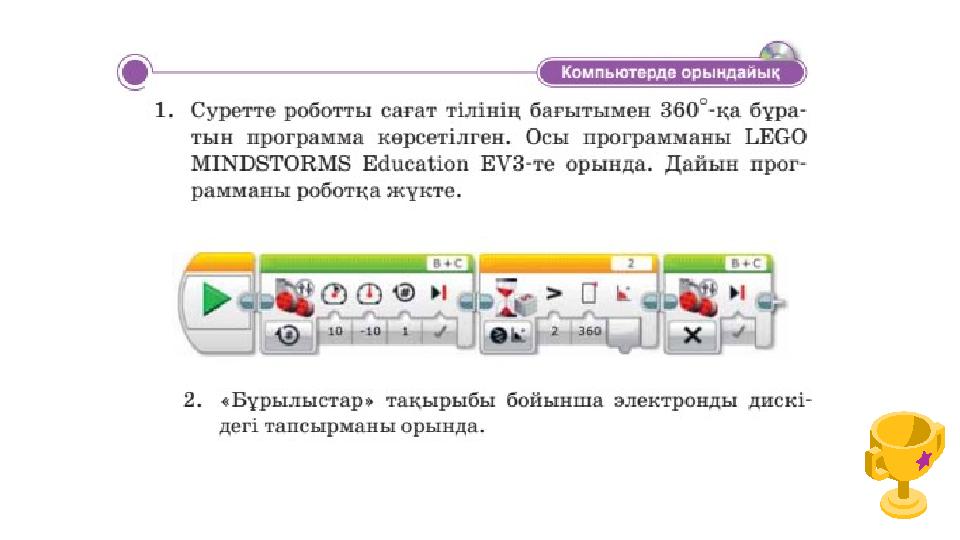
Бұрылыстар.
3-бөлім бойынша қорытынды тапсырмалар.
БЖБ 3
Оқу мақсаты:
5.3.3.1 роботтың бұрыштық бейімділігін анықтау үшін
бағдарламалар жасау;
5.3.4.4 гироскопиялық датчик жұмыс істеу принципін
түсіндіру
1 слайд
Бұрылыстар. 3-бөлім бойынша қорытынды тапсырмалар. БЖБ 3 Оқу мақсаты: 5.3.3.1 роботтың бұрыштық бейімділігін анықтау үшін бағдарламалар жасау; 5.3.4.4 гироскопиялық датчик жұмыс істеу принципін түсіндіру

#2 слайд
Гидраскопиялық дачикті роботқа орналастыру үшін алдымен
Жетекші платформаны құрастыруымыз керек.
Жетекші платформаны жинау үшін LEGO MINDSTORMS Education EV3
программасын ашамыз. Жинақ бойынша нұсқаулық бөліміндегі
Конструкторлар идеясы ішінен Жетекші платформаны ашамыз.
Нұсқаулық бойынша құрастырамыз.
2 слайд
Гидраскопиялық дачикті роботқа орналастыру үшін алдымен Жетекші платформаны құрастыруымыз керек. Жетекші платформаны жинау үшін LEGO MINDSTORMS Education EV3 программасын ашамыз. Жинақ бойынша нұсқаулық бөліміндегі Конструкторлар идеясы ішінен Жетекші платформаны ашамыз. Нұсқаулық бойынша құрастырамыз.

#3 слайд
Роботқа гидраскопиялық датчикті орналастыру үшін
оны кабель арқылы EV3моделінің 2-портына қосамыз.
3 слайд
Роботқа гидраскопиялық датчикті орналастыру үшін оны кабель арқылы EV3моделінің 2-портына қосамыз.
#4 слайд
4 слайд
#5 слайд
5 слайд

#6 слайд
6 слайд
#7 слайд
7 слайд
#8 слайд
8 слайд
#9 слайд
9 слайд

#10 слайд
10 слайд


 Жүктеу
Жүктеушағым қалдыра аласыз



 Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген
Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген










