ЖИ көмекші
ЖИ көмекші


0 / 1

Барлық 400 000 материалдарды тегін жүктеу үшін
Ұнаған тарифті таңдаңыз
Айлық
Жылдық
1 - күндік
Танысу 690 ₸ / 1 күнге
Таңдау
UstazTilegi AI - ЖИ арқылы тегін ҚМЖ, БЖБ, ТЖБ, тест, презентация, авторлық бағдарлама т.б. 10 материал жасау
Материалдар бөлімі - Барлық 400 000 материалдарды тегін 30 материал жүктеу
Аттестация ПББ тестеріне доступ аласыз шексіз
Көрнекілік бөлімі - 10 000 астам көрнекіліктерді жүктеу Күніне 2 көрнекілік жүктеу
Жеке ҚМЖ бөлімінде - дайын ҚМЖ-ларды, презентацияларды жүктеу5 файлды тегін жүктеу
Олимпиада, турнир, байқауларға 50% жеңілдік
1 - айлық
Стандарт
2990 ₸ / айына
UstazTilegi AI - ЖИ арқылы тегін ҚМЖ, БЖБ, ТЖБ, тест, презентация, авторлық бағдарлама т.б. жасау 30 материал жасау
Материалдар бөлімі - Барлық 400 000 материалдарды тегін 900 материал жүктеу
Аттестация ПББ тестеріне доступ аласыз шексіз
Көрнекілік бөлімі - 10 000 астам көрнекіліктерді жүктеу30 көрнекілік жүктеу
Жеке ҚМЖ бөлімінде - дайын ҚМЖ-ларды, презентацияларды жүктеу 150 файлды тегін жүктеу
Жинақталған ҚМЖ бөлімінде 10 файлды тегін жүктеу
Олимпиада, турнир, байқауларға 50% жеңілдік
Іс-шаралар (мини-курстар, семинарлар, конференциялар) тегін қатысу
1 - айлық
Шебер 7990 ₸ / айына
Таңдау
UstazTilegi AI - ЖИ арқылы тегін ҚМЖ, БЖБ, ТЖБ, тест, презентация, авторлық бағдарлама т.б. жасау 150 материал жасау
Материалдар бөлімі - Барлық 400 000 материалдарды тегін 900 материал жүктеу
Аттестация ПББ тестеріне доступ аласыз шексіз
Көрнекілік бөлімі - 10 000 астам көрнекіліктерді жүктеу90 көрнекілік жүктеу
Жеке ҚМЖ бөлімінде - дайын ҚМЖ-ларды, презентацияларды жүктеу 300 файлды тегін жүктеу
Жинақталған ҚМЖ бөлімінде 50 файлды тегін жүктеу
Олимпиада, турнир, байқауларға 50% жеңілдік
Іс-шаралар (мини-курстар, семинарлар, конференциялар) тегін қатысу

Назар аударыңыз!
Сіз барлық мүмкіндікті қолдандыңыз.
Қалған материалдарды ертең жүктей аласыз.
Ок
Материалдың қысқаша нұсқасы
ТОПСАЛЫ ТӨРТТИЕКТІ МЕХАНИЗМНІҢ КОМПЬЮТЕРЛІК МОДЕЛІ
Механиканың есебін шешуде графикалық әдіс кез келген механизмнің орнын, тиектің жылдамдығы мен үдеуін анықтауда көрнекті және жан - жақты болып табылады. Бірақ бұл әдіс аналитикалық шешімнің дәлдігін анықтай алмайды. Ал соңғы уақытта есептің аналитикалық шешімін алуға мүмкіндік беретін және экранда бейнелейтін, сондай – ақ шешімнің әр түрлі бастапқы шарттарында зерттеуге болатын компьютерлің моделі талап етіледі.
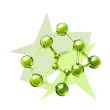
Топсалы төрттиекті механизмді
қарастырайық (1 сурет), мұндағы механизм тиектерінің осі АВСD
контурын құрайды, ал тиектерінің орны
 арқылы анықталады.
Аналитикалық зерттеуді векторлық контурлар әдісі арқылы жүргізейік.
Мұндағы
арқылы анықталады.
Аналитикалық зерттеуді векторлық контурлар әдісі арқылы жүргізейік.
Мұндағы  - модуль вектор бойынша
алынған айнымалы. Механизмнің тиектерінің ұзындығы
және көлбеу бұршышы ,сондай – ақ 1
мен 4 бекітілген топсалары белгілі.
- модуль вектор бойынша
алынған айнымалы. Механизмнің тиектерінің ұзындығы
және көлбеу бұршышы ,сондай – ақ 1
мен 4 бекітілген топсалары белгілі.
Сурет 1. Екі векторлық контуры бар топсалы төрттиекті механизм.
Берілген механизмнің әрбір элементіне алгоритмін құрайық:
|
№ |
Элемент |
Delphi-дегі коды |
|
1 |
Топса |
procedure TForm1.Sharnir(x,y:real); begin series1.AddXY(x,y); series2.AddXY(x,y); end; |
|
2 |
Негізі |
procedure TForm1.Osnovanie(x,y:real); begin series3.AddXY(x,y-1); series4.AddXY(x,y-3); end; |
|
3 |
Тиек |
procedure TForm1.zveno(s1,s2:integer); begin series5.AddArrow(L[s1,1],L[s1,2],L[s2,1],L[s2,2]); end; |
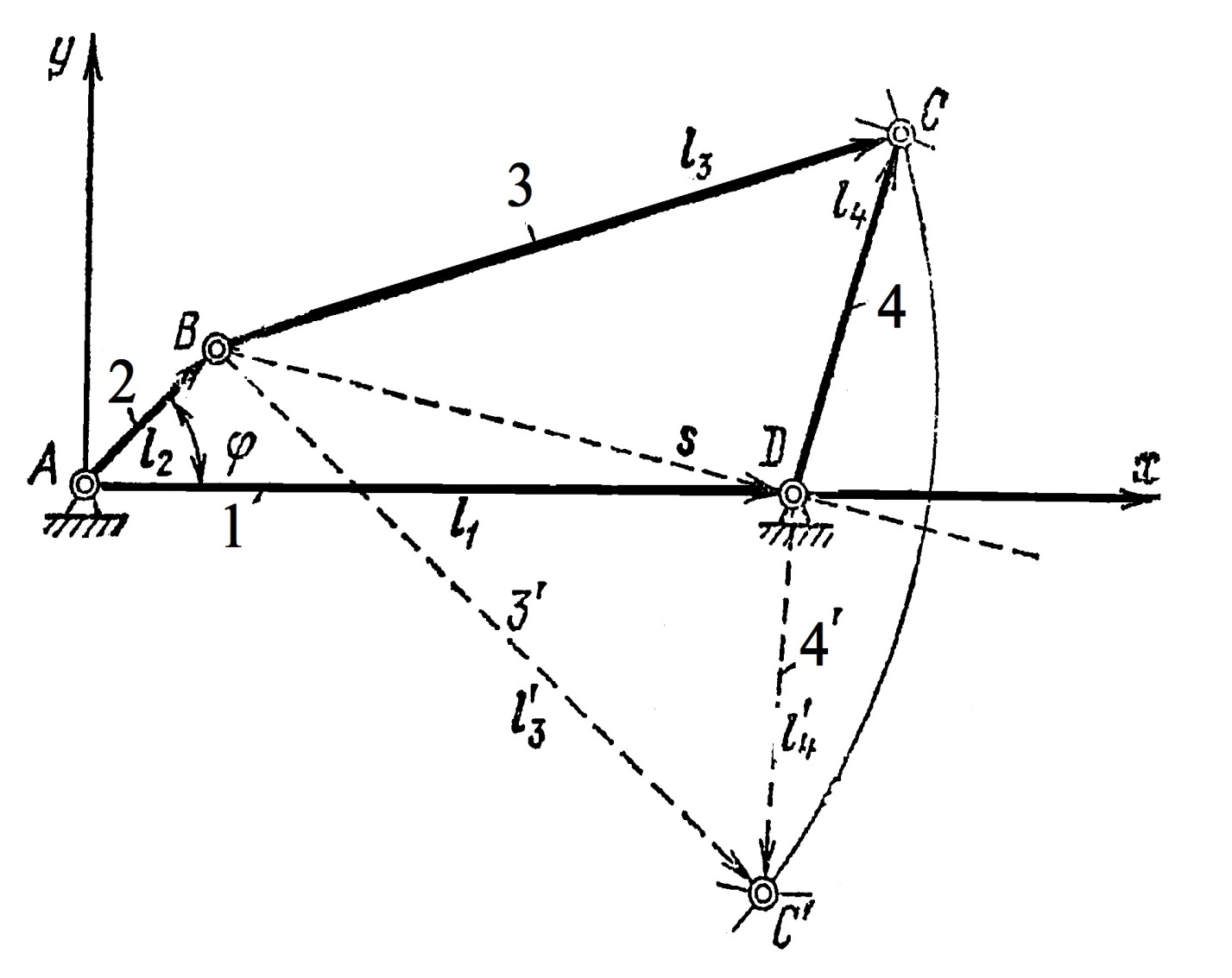
TСhart компонентасы (2 сурет) берілген түзулерді, векторларды және белгілерді қамтиды.
Сурет 2 – TChart компонентасы
|
№ |
Delphi-дегі коды |
Баяндалуы |
|
1 |
begin series1.Clear; series2.Clear; series3.Clear; series4.Clear; series5.Clear; |
Берілгендерді жою |
|
2 |
d[1]:=strtofloat(LabeledEdit1.Text); d[2]:=strtofloat(LabeledEdit2.Text); d[3]:=strtofloat(LabeledEdit3.Text); d[4]:=strtofloat(LabeledEdit4.Text); fi[1]:=strtofloat(LabeledEdit5.Text); |
Бастапқы шарттарын алу |
|
3 |
L[1,1]:=0; L[1,2]:=0; |
Бірінші топсаның координатасы |
|
4 |
Sharnir(L[1,1],L[1,2]); Osnovanie(L[1,1],L[1,2]); |
Бірінші топсаның бейнесі |
|
5 |
L[4,1]:=d[1]; L[4,2]:=0; Sharnir(L[4,1],L[4,2]); Osnovanie(L[4,1],L[4,2]); |
4 топсаның координатасы және оның құрылуы |
|
6 |
L[2,1]:=d[2]*cos(fi[1]*3.14/180); L[2,2]:=d[2]*sin(fi[1]*3.14/180); Sharnir(L[2,1],L[2,2]); |
2 топсаның ізделінуі және оның құрылуы |
|
7 |
zveno(1,2); |
№2 тиектің құрылуы |
|
8 |
S3(L[2,1],L[2,2],d[3],L[4,1],L[4,2],d[4]); |
3 топсаның координатасының ізделінуі |
|
9 |
zveno(2,3); zveno(3,4); Sharnir(L[3,1],L[3,2]); end; |
Қалған тиектер мен топсаның құрылуы |
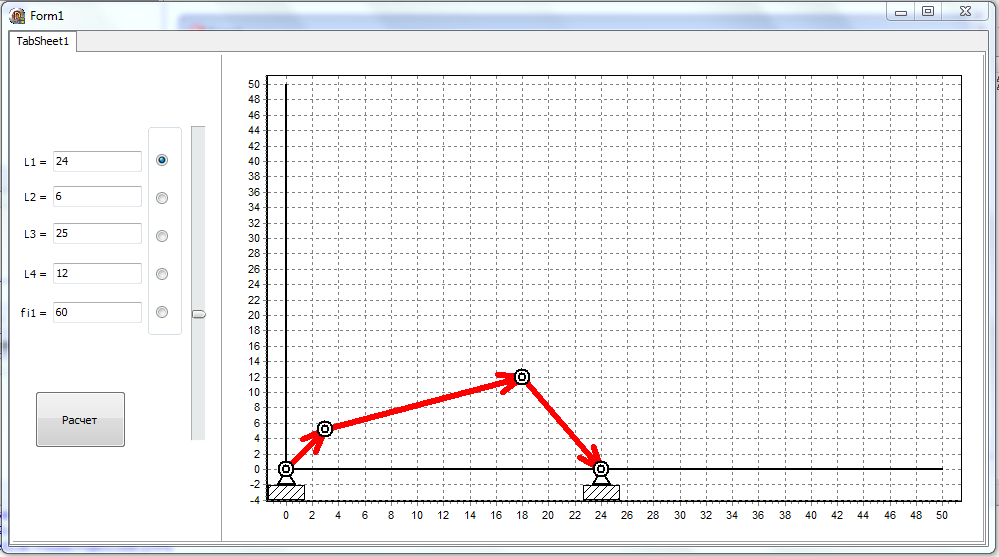
Сурет 3 – Программа терезесі.
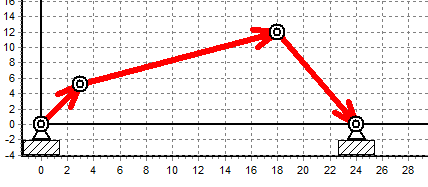
Сурет 4 – Төрттиекті механизмнің компьютерлік моделі
Қарастырылған модель автоматты режимде топсалардың координатасын анықтау арқылы әр түрлі төрттиекті механизмдердің моделін құруға мүмкіндік береді.(3-4 сурет).
Екінші топсаның координатасын анықтау үшін келесі теңдеулер жүйесін шешу қажет

Ал үшінші топсаға

жүйесі шешіледі.
Бұл модель төрттиекті механизмдердің құрылымын көрсетеді және жазық тұтқалы механизмдерді зерттеуде қолданылуы болады.
 Жүктеу
Жүктеу
ЖИ арқылы жасау
ЖИ арқылы жасау

Бөлісу
1 - айлық
Материал тарифі-96% жеңілдік
00
05
00
ҚМЖ
Ашық сабақ
Тәрбие сағаты
Презентация
БЖБ, ТЖБ тесттер
Көрнекіліктер
Балабақшаға арнарлған құжаттар
Мақала, Эссе
Дидактикалық ойындар
және тағы басқа 400 000 материал
Барлық 400 000 материалдарды шексіз
жүктеу мүмкіндігіне ие боласыз
жүктеу мүмкіндігіне ие боласыз
1 990 ₸ 49 000₸
1 айға қосылу
Материалға шағымдану
Бұл материал сайт қолданушысы жариялаған. Материалдың ішінде жазылған барлық ақпаратқа жауапкершілікті жариялаған қолданушы жауап береді. Ұстаз тілегі тек ақпаратты таратуға қолдау көрсетеді. Егер материал сіздің авторлық құқығыңызды бұзған болса немесе басқа да себептермен сайттан өшіру керек деп ойласаңыз осында жазыңыз
Жариялаған:
Турткулбаева Замира Отебайқызы 01 Қазан 2018
01 Қазан 2018 393
393Шағым жылдам қаралу үшін барынша толық ақпарат жіберіңіз
ТОПСАЛЫ ТӨРТТИЕКТІ МЕХАНИЗМНІҢ КОМПЬЮТЕРЛІК МОДЕЛІ
Тақырып бойынша 11 материал табылды
ТОПСАЛЫ ТӨРТТИЕКТІ МЕХАНИЗМНІҢ КОМПЬЮТЕРЛІК МОДЕЛІ
Материал туралы қысқаша түсінік
Бұл модель төрттиекті механизмдердің құрылымын көрсетеді және жазық тұтқалы механизмдерді зерттеуде қолданылады.
Материалдың қысқаша нұсқасы
ТОПСАЛЫ ТӨРТТИЕКТІ МЕХАНИЗМНІҢ КОМПЬЮТЕРЛІК МОДЕЛІ
Механиканың есебін шешуде графикалық әдіс кез келген механизмнің орнын, тиектің жылдамдығы мен үдеуін анықтауда көрнекті және жан - жақты болып табылады. Бірақ бұл әдіс аналитикалық шешімнің дәлдігін анықтай алмайды. Ал соңғы уақытта есептің аналитикалық шешімін алуға мүмкіндік беретін және экранда бейнелейтін, сондай – ақ шешімнің әр түрлі бастапқы шарттарында зерттеуге болатын компьютерлің моделі талап етіледі.
Топсалы төрттиекті механизмді
қарастырайық (1 сурет), мұндағы механизм тиектерінің осі АВСD
контурын құрайды, ал тиектерінің орны
арқылы анықталады.
Аналитикалық зерттеуді векторлық контурлар әдісі арқылы жүргізейік.
Мұндағы - модуль вектор бойынша
алынған айнымалы. Механизмнің тиектерінің ұзындығы
және көлбеу бұршышы ,сондай – ақ 1
мен 4 бекітілген топсалары белгілі.
Сурет 1. Екі векторлық контуры бар топсалы төрттиекті механизм.
Берілген механизмнің әрбір элементіне алгоритмін құрайық:
|
№ |
Элемент |
Delphi-дегі коды |
|
1 |
Топса |
procedure TForm1.Sharnir(x,y:real); begin series1.AddXY(x,y); series2.AddXY(x,y); end; |
|
2 |
Негізі |
procedure TForm1.Osnovanie(x,y:real); begin series3.AddXY(x,y-1); series4.AddXY(x,y-3); end; |
|
3 |
Тиек |
procedure TForm1.zveno(s1,s2:integer); begin series5.AddArrow(L[s1,1],L[s1,2],L[s2,1],L[s2,2]); end; |
TСhart компонентасы (2 сурет) берілген түзулерді, векторларды және белгілерді қамтиды.
Сурет 2 – TChart компонентасы
|
№ |
Delphi-дегі коды |
Баяндалуы |
|
1 |
begin series1.Clear; series2.Clear; series3.Clear; series4.Clear; series5.Clear; |
Берілгендерді жою |
|
2 |
d[1]:=strtofloat(LabeledEdit1.Text); d[2]:=strtofloat(LabeledEdit2.Text); d[3]:=strtofloat(LabeledEdit3.Text); d[4]:=strtofloat(LabeledEdit4.Text); fi[1]:=strtofloat(LabeledEdit5.Text); |
Бастапқы шарттарын алу |
|
3 |
L[1,1]:=0; L[1,2]:=0; |
Бірінші топсаның координатасы |
|
4 |
Sharnir(L[1,1],L[1,2]); Osnovanie(L[1,1],L[1,2]); |
Бірінші топсаның бейнесі |
|
5 |
L[4,1]:=d[1]; L[4,2]:=0; Sharnir(L[4,1],L[4,2]); Osnovanie(L[4,1],L[4,2]); |
4 топсаның координатасы және оның құрылуы |
|
6 |
L[2,1]:=d[2]*cos(fi[1]*3.14/180); L[2,2]:=d[2]*sin(fi[1]*3.14/180); Sharnir(L[2,1],L[2,2]); |
2 топсаның ізделінуі және оның құрылуы |
|
7 |
zveno(1,2); |
№2 тиектің құрылуы |
|
8 |
S3(L[2,1],L[2,2],d[3],L[4,1],L[4,2],d[4]); |
3 топсаның координатасының ізделінуі |
|
9 |
zveno(2,3); zveno(3,4); Sharnir(L[3,1],L[3,2]); end; |
Қалған тиектер мен топсаның құрылуы |
Сурет 3 – Программа терезесі.
Сурет 4 – Төрттиекті механизмнің компьютерлік моделі
Қарастырылған модель автоматты режимде топсалардың координатасын анықтау арқылы әр түрлі төрттиекті механизмдердің моделін құруға мүмкіндік береді.(3-4 сурет).
Екінші топсаның координатасын анықтау үшін келесі теңдеулер жүйесін шешу қажет
Ал үшінші топсаға
жүйесі шешіледі.
Бұл модель төрттиекті механизмдердің құрылымын көрсетеді және жазық тұтқалы механизмдерді зерттеуде қолданылуы болады.
 Жүктеу
Жүктеу Бөлісу
ЖИ арқылы жасау
Файл форматы:

doc

01.10.2018

393
Жүктеу
ЖИ арқылы жасау
Жариялаған:
Бұл материалды қолданушы жариялаған. Ustaz Tilegi ақпаратты жеткізуші ғана болып табылады. Жарияланған материалдың мазмұны мен авторлық құқық толықтай автордың жауапкершілігінде. Егер материал авторлық құқықты бұзады немесе сайттан алынуы тиіс деп есептесеңіз,
шағым қалдыра аласыз
шағым қалдыра аласыз