 ЖИ көмекші
ЖИ көмекші




М R 0.
АО «АКАДЕМИЯ ГРАЖДАНСКОЙ АВИАЦИИ»
Кафедра
«Летная эксплуатация воздушных судов»
Дисциплина «Базовая аэродинамика»
Рефферат
Тема «Устойчивость, управляемость. Динамика полета (flight stability and dynamics). Характеристика органов управления»
Выполнил: Құнанбай Абай Саятұлы
ДО-УС-МХ-24-2
Преподаватель: Сейфула Г.Н
Содержание
Глава 1. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА.
ОСНОВНЫЕ ПОНЯТИЯ 5
-
Статическая и динамическая устойчивость и управляемость
самолета 10
ВВЕДЕНИЕ
Динамика полета (ДП) – раздел механики, изучающий законы движения летательных аппаратов (ЛА) в различных средах (атмосфера, космос, атмосфера–вода), условиях эксплуатации (ветер, отказ борто- вых систем, двигателя, рулей и т. п.) и этапах полета (взлет, посадка, набор высоты и т. п.). Динамика полета совместно с аэродинамикой является теоретической основой авиации и ракетной техники.
При изучении движения ЛА возникают две основные группы задач. Группа 1. Устанавливается связь между внешними силами, кото- рые действуют на ЛА, и параметрами, описывающими траекторию движения и состояние ЛА (координаты, скорость, высота, угловое по- ложение, угловая скорость). Задачи этой группы изложены в части 1
учебного пособия.
Группа 2. Исследование характеристик устойчивости и управляе- мости, которые имеет ЛА при движении по некоторой траектории (па- раметры «качества» движения, потребные отклонения органов управ- ления, усилия на рычагах управления).
В задачах первой группы, как правило, летательный аппарат рас- сматривается как тяжелая материальная точка. Поэтому движение ЛА описывается только уравнениями равновесия сил. Моменты, дей- ствующие на ЛА, принимаются равными нулю, т. е. считается, что управление ЛА идеальное и обеспечивает заданную траекторию дви- жения.
В задачах второй группы ЛА рассматривается как твердое тело или система материальных точек, движущихся под действием сил. Поэто- му движение ЛА описывается уравнениями сил и уравнениями момен- тов. В результате решения задач этой группы выясняется возможность движения ЛА по заданной траектории и способы обеспечения такого движения. Задачи этой группы изложены в настоящей (второй) части учебного пособия.
3
![]()
4
Работа состоит из пяти глав. Рассматриваются вопросы устойчиво- сти и управляемости летательных аппаратов. Описываются зависимо- сти сил и моментов, действующих на ЛА от геометрических парамет- ров, конфигурации, режимов полета. Анализируются вопросы балан- сировки ЛА, уравнения возмущенного движения. Кратко освещены особенности динамики полета современных самолетов, пеpспективные pазpаботки в области аэродинамики, динамики полета.Каждая глава содержит контрольные вопросы для закрепления пройденного материала.
Работа предназначена для студентов III, IV курсов ФЛА направле- ний «Баллистика и гидроаэродинамика», «Авиастроение», «Техниче- ская эксплуатация летательных аппаратов и двигателей», изучающих курсы «Динамика полета» и «Аэрогидрогазодинамика». Кроме того, пособие может быть полезно при курсовом и дипломном проектирова- нии.
Авторы глубоко признательны в.н.с. Ю.Н. Темлякову и доценту В.П. Одноралу за полезные замечания, сделанные при рецензировании рукописи.
![]()
Г Л А В А 1
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА. ОСНОВНЫЕ ПОНЯТИЯ
Вспомним понятие «устойчивость положения» или «устойчивость равновесия» твердого тела. Различают устойчивое, неустойчивое и безразличное равновесие тела (рис. 1.1).

а б в Рис. 1.1. Равновесие твердого тела:
а – устойчивое; б – неустойчивое; в – безразличное
В том случае когда после отклонения от положения равновесия на величину тело само возвращается в исходное положение, имеет ме- сто устойчивое равновесие, если не возвращается – неустойчивое равно- весие, если любое положение равновесно – безразличное равновесие.
Очевидно, что для устойчивости положения необходимы два условия:
-
при отклонении тела от положения равновесия должен возник- нуть момент (или сила), действие которого направлено в сторону ис- ходного положения;
-
затухание, или демпфирование, движения тела.
Аналогичные рассуждения применимы по отношению к движению летательного аппарата.
Пусть самолет движется по заданной траектории со скоростью, изменяющейся по определенному закону, при этом положение само- лета также изменяется по определенному закону. Такое движение при отсутствии возмущений называется основным (опорным) дви- жением.
В полете на самолет действуют силы и моменты, не предусмотрен- ные программой полета, – возмущающие факторы. Они могут возни- кать по различным причинам: неоднородность воздушных масс, не- равномерность работы двигателя, технологические отклонения разме- ров планера, движение масс внутри самолета, сброс грузов, ошибки пилотирования и т. д.
Пусть на самолет в некоторый момент времени кратковременно подействовал возмущающий фактор. После прекращения действия возмущающего фактора самолет будет двигаться по закону, отлично- му от закона опорного движения. Такое движение называется воз- мущенным.
Если с течением времени возмущенное движение снова переходит в основное, то движение самолета будет устойчивым. Таким образом, устойчивостью движения самолета называется свойство кинемати- ческих параметров возвращаться к своим исходным значениям в опор- ном движении после отклонения самолета от исходного движения и прекращения действия возмущающих факторов.
Различают «устойчивость в большом» – при любой величине воз- мущений и «устойчивость в малом» – при возмущениях не выше ка- ких-либо пределов.
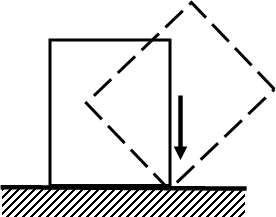
Рис. 1.2. Пример «устойчи- вости в малом»
Пример «устойчивости в малом» при- веден на рис. 1.2. В большинстве техниче- ских задач, в том числе в динамике полета ЛА, рассматривается «устойчивость в ма- лом».
Для оценки устойчивости самолета необходимо рассматривать не только сам факт возвращения к опорному движению, но и характер переходного процесса (рис. 1.3).
 а
а
t
xi
t
t
xi
xi
t
xi
бв г
Рис. 1.3. Типы переходных процессов:
а – апериодический быстрозатухающий; б – колебатель- ный быстрозатухающий; в – апериодический слабозату-
хающий; г – колебательный слабозатухающий
Возмущенное движение самолета обычно состоит из нескольких накладывающихся друг на друга колебательных и апериодических движений. На оценку летчиком устойчивости самолета основное влия- ние оказывает короткопериодическое движение.
Управляемость – это способность самолета реагировать измене- ниями соответствующих внешних сил на действия рычагами управле- ния. Для того чтобы изменять действующие на самолет внешние силы (на большинстве существующих самолетов), необходимо обеспечить возможность изменять угловое положение самолета в пространстве, следовательно, для управления самолетом необходимо иметь возмож- ность целенаправленно изменять моменты внешних сил. Этого можно добиться перемещением точки приложения силы тяжести (центр тяже- сти самолета) или изменением точки приложения аэродинамической силы (центра давления).
Первый способ – балансирный, применяется, например, на дельта- планах. Управление современными самолетами осуществляется по второму способу, впервые примененному Можайским.
Рассмотрим пример: пусть исходный режим – горизонтальный по- лет; требуется увеличить подъемную силу для искривления траектории вверх. Очевидно, для этого необходимо увеличить угол атаки, что тре- бует отклонения руля высоты (рис. 1.4 и 1.5).
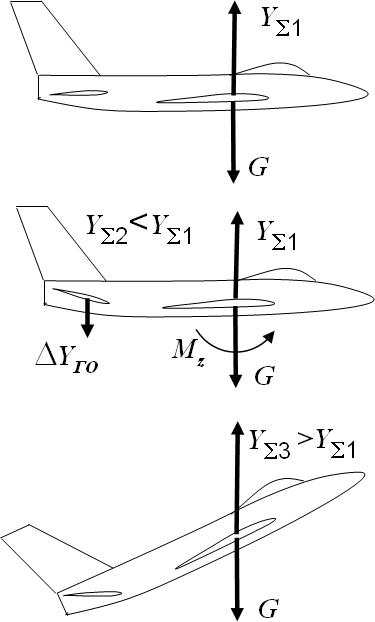
Рис. 1.4. Переход из горизонтального полета в набор высоты
На поворот самолета требуется определенное время. В некоторых случаях это время может получиться большим, а сам переходный про- цесс недостаточно плавный, с забросами, т. е. самолет будет обладать неудовлетворительной управляемостью.
Данный пример показывает, что устойчивость и управляемость са- молетов неразрывно связаны. Отклонение рулей можно рассматривать как возмущение, нарушающее исходный режим полета. После откло- нения рулей движение самолета является возмущенным по отношению к новому опорному режиму, соответствующему новому положению рулей. Если самолет обладает хорошей устойчивостью, то и переход- ный процесс будет удовлетворительным и самолет будет хорошо вы- держивать новый опорный режим. Таким образом, хорошая управляе- мость самолета складывается из хорошей устойчивости, легкости и
точности отклонения рулей, ограничения опасных режимов, возмож- ности вывода из опасных режимов. (Здесь устойчивость следует пони- мать в широком смысле. В дальнейшем мы рассмотрим преимущества и недостатки статически неустойчивого самолета.)
 а
а
t
Запаздывание
t
Просадка
H
t
Ya
t
ГО
б
в
г
Рис. 1.5. Переходные процессы при откло-
нении руля высоты:
а – отклонение руля высоты; б – угол атаки;
в – подъемная сила; г – высота полета
Часто можно встретить неправильное утверждение, что чем больше устойчивость ЛА, тем хуже управляемость. Устойчивость не может быть «больше» или «меньше», она может быть «лучше» или «хуже».
«Больше» или «меньше» могут быть коэффициенты статической устойчивости, излишне большие (по модулю) значения которых дей- ствительно ухудшают управляемость.
Говорить об устойчивости самолета без указания режимов поле- та не имеет смысла. Необходимо указывать, свободны или зажаты рули, каковы режим работы двигателя, скорость, центровка, высота и т. д.
-
СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
Как показано выше, при оценке устойчивости движения нужно вы- делить некоторое желаемое, опорное движение, рассчитанное без уче- та возмущений, и рассмотреть поведение ЛА для случая, когда реаль- ное движение под действием возмущений отклонилось от опорного.
Оценка устойчивости опорного (невозмущенного) движения само- лета производится с помощью количественных показателей статиче- ской и динамической устойчивости.
Статическая устойчивость самолета характеризует равновесие сил и моментов в опорном движении. Статически устойчивым по тому или иному параметру движения называют самолет, у которого откло- нение этого параметра от опорного значения приводит к появлению силы (в поступательном движении) или момента (в угловом движе- нии), направленных на уменьшение этого отклонения. Если сила или момент направлены на увеличение отклонения, самолет статически неустойчив.
Поясним это на примере продольного движения. Пусть в опорном продольном движении моменты тангажа, действующие на самолет, сбалансированы, уравновешены. Если теперь в результате возмущаю- щих воздействий угол атаки отклонится от опорного на малую величи- ну , а положение органов управления не изменится, то равновесие моментов будет нарушено. Возникнет неуравновешенный момент тан- гажа, стремящийся либо уменьшить начальное отклонение угла атаки, либо увеличить его. В линейном приближении величина этого момента будет равна
где М Мz
Мz М ,
![]()
z
– частная производная момента тангажа по углу атаки.
![]()
![]()
z
z
![]()
z
Если частная производнаяМ будет отрицательной, то при
0
возникнет пикирующий момент
Мz М 0 , а при
0
– кабрирующий
Мz 0 . В обоих случаях возникший после
прекращения действия возмущений момент будет стремиться вернуть самолет в исходное положение равновесия: самолет будет обладать продольной статической устойчивостью по углу атаки.
Если, наоборот,
М 0 , то при
0 возникнет неуравновешен-
![]()
![]()
z
z
ный кабрирующий моментМz М 0 , а при
0
– пикиру-
![]()
z
ющий моментМz М 0 , которые будут стремиться увеличи-
вать начальное отклонение угла атаки – самолет будет статически не- устойчив по .
Таким образом, критерий продольной статической устойчивости
по перегрузке можно записать как т 0 , или тСу 0 (так как С ~
z z у
![]() на докритических углах атаки). Знак производной зависит
от взаимно-
на докритических углах атаки). Знак производной зависит
от взаимно-
го положения фокуса и центра масс:
тz x
![]()
![]() Cy
F
Cy
F
xT .
Рассуждая подобным образом, можно прийти к выводу о том, что,
![]()
x
если частная производная коэффициента момента крена по углу скольжения отрицательна m 0 , то самолет обладает поперечнойстатической устойчивостью, а при отрицательной производной ко-
![]()
y
эффициента момента рысканья по углу скольжения m 0 – флю-герной статической устойчивостью.
Влияние отклонения тех или иных параметров движения на стати- ческую устойчивость самолета может быть и более сложным. Так, от-
клонение перегрузки пуа от опорной (в частности, от пуа 1 для гори-
зонтального полета) при постоянной скорости связано с изменением и
угла атаки, и угловой скорости
z , поэтому статическая устойчивость
по перегрузке будет определяться как производной М , так и М z .
z z
К количественным показателям статической устойчивости самоле- та относятся степени продольной, поперечной и флюгерной статиче- ской устойчивости. Статическая устойчивость – необходимое, но не- достаточное условие устойчивости движения.
Другая группа показателей – характеристики динамической устой- чивости. При определении динамической устойчивости оценивается уже не начальная тенденция к устранению возмущения, а характер пе- реходного процесса (рис. 1.6) и конечное состояние – устойчивость или неустойчивость в смысле Ляпунова (обычно асимптотическая). К характеристикам динамической устойчивости относятся также показа- тели качества процесса уменьшения (затухания) возмущений: время
затухания отклонений, характер движения в процессе их уменьшения, максимальные значения отклонений, колебательность или монотон- ность (апериодичность) процесса затухания и т. п.
![]() Многие опорные режимы, реализуемые в полете, таковы,
что угло- вое ускорение или равно нулю, или невелико. В этом случае
можно принять, что вектор моментов, действующих на самолет
относительно
Многие опорные режимы, реализуемые в полете, таковы,
что угло- вое ускорение или равно нулю, или невелико. В этом случае
можно принять, что вектор моментов, действующих на самолет
относительно
его центра масс, Режимы полета, в которых можно с доста-
![]() точной
степенью точности считать действующие на самолет моменты
уравновешенными, сбалансированными М R
0, называются балан-
точной
степенью точности считать действующие на самолет моменты
уравновешенными, сбалансированными М R
0, называются балан-
сировочными.
Отклонения органов управления креном (элероны, элевоны), рыс- канием (руль направления) и тангажом (руль высоты, управляемый стабилизатор, элевоны), обеспечивающие равенство нулю моментов
МRх 0 ,
МRу 0
и М Rz 0
для данного опорного режима полета,
называются балансировочными отклонениями органов управления. Эти отклонения подбираются летчиком или автоматикой так, чтобы создаваемый ими момент уравновешивал остальные моменты в задан- ном опорном движении на заданных углах атаки, скольжения, скоро- сти и т. п.
Потребные для балансировки самолета на различных режимах от- клонения органов управления, перемещения рычагов управления, уси- лия на них в установившемся опорном движении количественно ха- рактеризуют статическую управляемость самолета.
Основными количественными показателями статической управ- ляемости являются производные отклонений рычагов управления и усилий, прикладываемых к ним, по параметрам движения, характери- зующим реакцию самолета на действия летчика, например в продоль-
ном движении
dхВ ,
![]()
![]() dпуа
dпуа
dРВ dпуа
где
хВ – величина линейного отклонения
ручки управления рулем высоты; РВ
– усилие, прикладываемое к руч-
ке, а представленные производные – градиенты хода ручки и усилия по перегрузке. Аналогичные показатели используются для оценки управ- ляемости по скорости, путевой (по рысканию) и поперечной (по крену) статической управляемости. Оцениваются также максимальные значе- ния отклонения рычагов управления, усилий, сама возможность балан- сировки на предельных режимах полета и т. п.
Другая группа показателей управляемости – характеристики ди- намической управляемости.
При оценке динамической управляемости рассматривается харак- тер реакции самолета на отклонение органов управления от их балан- сировочных значений для перехода от одного установившегося режи- ма полета к другому, для парирования возмущений и для выполнения существенно неустановившихся маневров (рис. 1.6).

5
1
t
2
4
3
Рис. 1.6. Переходные процессы различного характера:
1 – устойчивый колебательный; 2 – устойчивый апериодиче- ский; 3 – неустойчивый апериодический; 4 – безразличный;
5 – без демпфирования
Требования к количественным характеристикам (показателям) устойчивости и управляемости закреплены в документах «АВИАЦИ- ОННЫЕ ПРАВИЛА. Часть 23. НОРМЫ ЛЕТНОЙ ГОДНОСТИ
ГРАЖДАНСКИХ ЛЕГКИХ САМОЛЕТОВ» и других аналогичных до- кументах.
По требованиям, предъявляемым к показателям устойчивости и управляемости, самолеты в зависимости от их массы и основного назначения подразделяются на классы: маневренные самолеты, огра- ниченно маневренные и неманевренные со взлетной массой до 100 т и свыше 100 т. Вид требований может быть различен в зависимости от целевых задач самолета и этапов полета, их выполнение является не- обходимым условием допуска самолета к летной эксплуатации.
Разработка требований к показателям устойчивости и управляемости самолета данного класса проводится на основе анализа и обобщения полученных в летных испытаниях оценок самолетов летчиками. В последние годы при формировании требований широко применяется математическое моделирование процесса пилотирования самолета, что позволяет глубже понять процесс взаимодействия самолета с летчиком.
В процессе проектирования самолета выбор ряда проектных пара- метров (прежде всего таких, как параметры оперения и органов управ- ления, положение ЦМ самолета и др.), удовлетворяющих требованиям к характеристикам устойчивости и управляемости, проводится на ос- нове соответствующих расчетов. Показатели устойчивости и управля- емости детально проверяются и корректируются в процессе летных испытаний и доводки самолета.
Как показывает опыт, только средствами аэродинамической ком- поновки нельзя обеспечить для современного скоростного (особенно сверхзвукового) самолета статическую и динамическую устойчивость и хорошую управляемость во всем диапазоне высот и скоростей поле- та. Только включение в систему управления специальных автоматиче- ских устройств позволяет получить необходимые характеристики устойчивости и управляемости самолета.
Методическая литература
В печатном виде
-
Расчет аэродинамических характеристик летательного аппарата. Ч. 1: метод. руководство к выполнению курсового проекта «Аэродинамика» для 4 курса ФЛА / Новосиб. гос. техн. ун-т; сост.: С.Г. Деришев, А.В. Игнатьева, В.Л. Чемезов. – Новосибирск, 2008. – 34 с.
-
Петошин В.И. Расчет летных характеристик / Новосиб. электротехн. ин-т, 1990. – 25 с.
-
Петошин В.И. Исследование динамики продольного и бокового движе- ния самолета / Новосиб. электротехн. ин-т, 1993. – 22 с.
Саленко С.Д. Исследование на АВМ собственных свойств самолета в продольном короткопериодическом
 Жүктеу
Жүктеу
жүктеу мүмкіндігіне ие боласыз
Бұл материал сайт қолданушысы жариялаған. Материалдың ішінде жазылған барлық ақпаратқа жауапкершілікті жариялаған қолданушы жауап береді. Ұстаз тілегі тек ақпаратты таратуға қолдау көрсетеді. Егер материал сіздің авторлық құқығыңызды бұзған болса немесе басқа да себептермен сайттан өшіру керек деп ойласаңыз осында жазыңыз
 14 Қараша 2024
14 Қараша 2024 77
77Устойчивость , управляемость. Динамика полета
М R 0.
АО «АКАДЕМИЯ ГРАЖДАНСКОЙ АВИАЦИИ»
Кафедра
«Летная эксплуатация воздушных судов»
Дисциплина «Базовая аэродинамика»
Рефферат
Тема «Устойчивость, управляемость. Динамика полета (flight stability and dynamics). Характеристика органов управления»
Выполнил: Құнанбай Абай Саятұлы
ДО-УС-МХ-24-2
Преподаватель: Сейфула Г.Н
Содержание
Глава 1. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА.
ОСНОВНЫЕ ПОНЯТИЯ 5
-
Статическая и динамическая устойчивость и управляемость
самолета 10
ВВЕДЕНИЕ
Динамика полета (ДП) – раздел механики, изучающий законы движения летательных аппаратов (ЛА) в различных средах (атмосфера, космос, атмосфера–вода), условиях эксплуатации (ветер, отказ борто- вых систем, двигателя, рулей и т. п.) и этапах полета (взлет, посадка, набор высоты и т. п.). Динамика полета совместно с аэродинамикой является теоретической основой авиации и ракетной техники.
При изучении движения ЛА возникают две основные группы задач. Группа 1. Устанавливается связь между внешними силами, кото- рые действуют на ЛА, и параметрами, описывающими траекторию движения и состояние ЛА (координаты, скорость, высота, угловое по- ложение, угловая скорость). Задачи этой группы изложены в части 1
учебного пособия.
Группа 2. Исследование характеристик устойчивости и управляе- мости, которые имеет ЛА при движении по некоторой траектории (па- раметры «качества» движения, потребные отклонения органов управ- ления, усилия на рычагах управления).
В задачах первой группы, как правило, летательный аппарат рас- сматривается как тяжелая материальная точка. Поэтому движение ЛА описывается только уравнениями равновесия сил. Моменты, дей- ствующие на ЛА, принимаются равными нулю, т. е. считается, что управление ЛА идеальное и обеспечивает заданную траекторию дви- жения.
В задачах второй группы ЛА рассматривается как твердое тело или система материальных точек, движущихся под действием сил. Поэто- му движение ЛА описывается уравнениями сил и уравнениями момен- тов. В результате решения задач этой группы выясняется возможность движения ЛА по заданной траектории и способы обеспечения такого движения. Задачи этой группы изложены в настоящей (второй) части учебного пособия.
3
![]()
4
Работа состоит из пяти глав. Рассматриваются вопросы устойчиво- сти и управляемости летательных аппаратов. Описываются зависимо- сти сил и моментов, действующих на ЛА от геометрических парамет- ров, конфигурации, режимов полета. Анализируются вопросы балан- сировки ЛА, уравнения возмущенного движения. Кратко освещены особенности динамики полета современных самолетов, пеpспективные pазpаботки в области аэродинамики, динамики полета.Каждая глава содержит контрольные вопросы для закрепления пройденного материала.
Работа предназначена для студентов III, IV курсов ФЛА направле- ний «Баллистика и гидроаэродинамика», «Авиастроение», «Техниче- ская эксплуатация летательных аппаратов и двигателей», изучающих курсы «Динамика полета» и «Аэрогидрогазодинамика». Кроме того, пособие может быть полезно при курсовом и дипломном проектирова- нии.
Авторы глубоко признательны в.н.с. Ю.Н. Темлякову и доценту В.П. Одноралу за полезные замечания, сделанные при рецензировании рукописи.
![]()
Г Л А В А 1
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА. ОСНОВНЫЕ ПОНЯТИЯ
Вспомним понятие «устойчивость положения» или «устойчивость равновесия» твердого тела. Различают устойчивое, неустойчивое и безразличное равновесие тела (рис. 1.1).
а б в Рис. 1.1. Равновесие твердого тела:
а – устойчивое; б – неустойчивое; в – безразличное
В том случае когда после отклонения от положения равновесия на величину тело само возвращается в исходное положение, имеет ме- сто устойчивое равновесие, если не возвращается – неустойчивое равно- весие, если любое положение равновесно – безразличное равновесие.
Очевидно, что для устойчивости положения необходимы два условия:
-
при отклонении тела от положения равновесия должен возник- нуть момент (или сила), действие которого направлено в сторону ис- ходного положения;
-
затухание, или демпфирование, движения тела.
Аналогичные рассуждения применимы по отношению к движению летательного аппарата.
Пусть самолет движется по заданной траектории со скоростью, изменяющейся по определенному закону, при этом положение само- лета также изменяется по определенному закону. Такое движение при отсутствии возмущений называется основным (опорным) дви- жением.
В полете на самолет действуют силы и моменты, не предусмотрен- ные программой полета, – возмущающие факторы. Они могут возни- кать по различным причинам: неоднородность воздушных масс, не- равномерность работы двигателя, технологические отклонения разме- ров планера, движение масс внутри самолета, сброс грузов, ошибки пилотирования и т. д.
Пусть на самолет в некоторый момент времени кратковременно подействовал возмущающий фактор. После прекращения действия возмущающего фактора самолет будет двигаться по закону, отлично- му от закона опорного движения. Такое движение называется воз- мущенным.
Если с течением времени возмущенное движение снова переходит в основное, то движение самолета будет устойчивым. Таким образом, устойчивостью движения самолета называется свойство кинемати- ческих параметров возвращаться к своим исходным значениям в опор- ном движении после отклонения самолета от исходного движения и прекращения действия возмущающих факторов.
Различают «устойчивость в большом» – при любой величине воз- мущений и «устойчивость в малом» – при возмущениях не выше ка- ких-либо пределов.
Рис. 1.2. Пример «устойчи- вости в малом»
Пример «устойчивости в малом» при- веден на рис. 1.2. В большинстве техниче- ских задач, в том числе в динамике полета ЛА, рассматривается «устойчивость в ма- лом».
Для оценки устойчивости самолета необходимо рассматривать не только сам факт возвращения к опорному движению, но и характер переходного процесса (рис. 1.3).
а
t
xi
t
t
xi
xi
t
xi
бв г
Рис. 1.3. Типы переходных процессов:
а – апериодический быстрозатухающий; б – колебатель- ный быстрозатухающий; в – апериодический слабозату-
хающий; г – колебательный слабозатухающий
Возмущенное движение самолета обычно состоит из нескольких накладывающихся друг на друга колебательных и апериодических движений. На оценку летчиком устойчивости самолета основное влия- ние оказывает короткопериодическое движение.
Управляемость – это способность самолета реагировать измене- ниями соответствующих внешних сил на действия рычагами управле- ния. Для того чтобы изменять действующие на самолет внешние силы (на большинстве существующих самолетов), необходимо обеспечить возможность изменять угловое положение самолета в пространстве, следовательно, для управления самолетом необходимо иметь возмож- ность целенаправленно изменять моменты внешних сил. Этого можно добиться перемещением точки приложения силы тяжести (центр тяже- сти самолета) или изменением точки приложения аэродинамической силы (центра давления).
Первый способ – балансирный, применяется, например, на дельта- планах. Управление современными самолетами осуществляется по второму способу, впервые примененному Можайским.
Рассмотрим пример: пусть исходный режим – горизонтальный по- лет; требуется увеличить подъемную силу для искривления траектории вверх. Очевидно, для этого необходимо увеличить угол атаки, что тре- бует отклонения руля высоты (рис. 1.4 и 1.5).
Рис. 1.4. Переход из горизонтального полета в набор высоты
На поворот самолета требуется определенное время. В некоторых случаях это время может получиться большим, а сам переходный про- цесс недостаточно плавный, с забросами, т. е. самолет будет обладать неудовлетворительной управляемостью.
Данный пример показывает, что устойчивость и управляемость са- молетов неразрывно связаны. Отклонение рулей можно рассматривать как возмущение, нарушающее исходный режим полета. После откло- нения рулей движение самолета является возмущенным по отношению к новому опорному режиму, соответствующему новому положению рулей. Если самолет обладает хорошей устойчивостью, то и переход- ный процесс будет удовлетворительным и самолет будет хорошо вы- держивать новый опорный режим. Таким образом, хорошая управляе- мость самолета складывается из хорошей устойчивости, легкости и
точности отклонения рулей, ограничения опасных режимов, возмож- ности вывода из опасных режимов. (Здесь устойчивость следует пони- мать в широком смысле. В дальнейшем мы рассмотрим преимущества и недостатки статически неустойчивого самолета.)
а
t
Запаздывание
t
Просадка
H
t
Ya
t
ГО
б
в
г
Рис. 1.5. Переходные процессы при откло-
нении руля высоты:
а – отклонение руля высоты; б – угол атаки;
в – подъемная сила; г – высота полета
Часто можно встретить неправильное утверждение, что чем больше устойчивость ЛА, тем хуже управляемость. Устойчивость не может быть «больше» или «меньше», она может быть «лучше» или «хуже».
«Больше» или «меньше» могут быть коэффициенты статической устойчивости, излишне большие (по модулю) значения которых дей- ствительно ухудшают управляемость.
Говорить об устойчивости самолета без указания режимов поле- та не имеет смысла. Необходимо указывать, свободны или зажаты рули, каковы режим работы двигателя, скорость, центровка, высота и т. д.
-
СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
Как показано выше, при оценке устойчивости движения нужно вы- делить некоторое желаемое, опорное движение, рассчитанное без уче- та возмущений, и рассмотреть поведение ЛА для случая, когда реаль- ное движение под действием возмущений отклонилось от опорного.
Оценка устойчивости опорного (невозмущенного) движения само- лета производится с помощью количественных показателей статиче- ской и динамической устойчивости.
Статическая устойчивость самолета характеризует равновесие сил и моментов в опорном движении. Статически устойчивым по тому или иному параметру движения называют самолет, у которого откло- нение этого параметра от опорного значения приводит к появлению силы (в поступательном движении) или момента (в угловом движе- нии), направленных на уменьшение этого отклонения. Если сила или момент направлены на увеличение отклонения, самолет статически неустойчив.
Поясним это на примере продольного движения. Пусть в опорном продольном движении моменты тангажа, действующие на самолет, сбалансированы, уравновешены. Если теперь в результате возмущаю- щих воздействий угол атаки отклонится от опорного на малую величи- ну , а положение органов управления не изменится, то равновесие моментов будет нарушено. Возникнет неуравновешенный момент тан- гажа, стремящийся либо уменьшить начальное отклонение угла атаки, либо увеличить его. В линейном приближении величина этого момента будет равна
где М Мz
Мz М ,
![]()
z
– частная производная момента тангажа по углу атаки.
![]()
![]()
z
z
![]()
z
Если частная производнаяМ будет отрицательной, то при
0
возникнет пикирующий момент
Мz М 0 , а при
0
– кабрирующий
Мz 0 . В обоих случаях возникший после
прекращения действия возмущений момент будет стремиться вернуть самолет в исходное положение равновесия: самолет будет обладать продольной статической устойчивостью по углу атаки.
Если, наоборот,
М 0 , то при
0 возникнет неуравновешен-
![]()
![]()
z
z
ный кабрирующий моментМz М 0 , а при
0
– пикиру-
![]()
z
ющий моментМz М 0 , которые будут стремиться увеличи-
вать начальное отклонение угла атаки – самолет будет статически не- устойчив по .
Таким образом, критерий продольной статической устойчивости
по перегрузке можно записать как т 0 , или тСу 0 (так как С ~
z z у
![]() на докритических углах атаки). Знак производной зависит
от взаимно-
на докритических углах атаки). Знак производной зависит
от взаимно-
го положения фокуса и центра масс:
тz x
![]()
![]() Cy
F
Cy
F
xT .
Рассуждая подобным образом, можно прийти к выводу о том, что,
![]()
x
если частная производная коэффициента момента крена по углу скольжения отрицательна m 0 , то самолет обладает поперечнойстатической устойчивостью, а при отрицательной производной ко-
![]()
y
эффициента момента рысканья по углу скольжения m 0 – флю-герной статической устойчивостью.
Влияние отклонения тех или иных параметров движения на стати- ческую устойчивость самолета может быть и более сложным. Так, от-
клонение перегрузки пуа от опорной (в частности, от пуа 1 для гори-
зонтального полета) при постоянной скорости связано с изменением и
угла атаки, и угловой скорости
z , поэтому статическая устойчивость
по перегрузке будет определяться как производной М , так и М z .
z z
К количественным показателям статической устойчивости самоле- та относятся степени продольной, поперечной и флюгерной статиче- ской устойчивости. Статическая устойчивость – необходимое, но не- достаточное условие устойчивости движения.
Другая группа показателей – характеристики динамической устой- чивости. При определении динамической устойчивости оценивается уже не начальная тенденция к устранению возмущения, а характер пе- реходного процесса (рис. 1.6) и конечное состояние – устойчивость или неустойчивость в смысле Ляпунова (обычно асимптотическая). К характеристикам динамической устойчивости относятся также показа- тели качества процесса уменьшения (затухания) возмущений: время
затухания отклонений, характер движения в процессе их уменьшения, максимальные значения отклонений, колебательность или монотон- ность (апериодичность) процесса затухания и т. п.
![]() Многие опорные режимы, реализуемые в полете, таковы,
что угло- вое ускорение или равно нулю, или невелико. В этом случае
можно принять, что вектор моментов, действующих на самолет
относительно
Многие опорные режимы, реализуемые в полете, таковы,
что угло- вое ускорение или равно нулю, или невелико. В этом случае
можно принять, что вектор моментов, действующих на самолет
относительно
его центра масс, Режимы полета, в которых можно с доста-
![]() точной
степенью точности считать действующие на самолет моменты
уравновешенными, сбалансированными М R
0, называются балан-
точной
степенью точности считать действующие на самолет моменты
уравновешенными, сбалансированными М R
0, называются балан-
сировочными.
Отклонения органов управления креном (элероны, элевоны), рыс- канием (руль направления) и тангажом (руль высоты, управляемый стабилизатор, элевоны), обеспечивающие равенство нулю моментов
МRх 0 ,
МRу 0
и М Rz 0
для данного опорного режима полета,
называются балансировочными отклонениями органов управления. Эти отклонения подбираются летчиком или автоматикой так, чтобы создаваемый ими момент уравновешивал остальные моменты в задан- ном опорном движении на заданных углах атаки, скольжения, скоро- сти и т. п.
Потребные для балансировки самолета на различных режимах от- клонения органов управления, перемещения рычагов управления, уси- лия на них в установившемся опорном движении количественно ха- рактеризуют статическую управляемость самолета.
Основными количественными показателями статической управ- ляемости являются производные отклонений рычагов управления и усилий, прикладываемых к ним, по параметрам движения, характери- зующим реакцию самолета на действия летчика, например в продоль-
ном движении
dхВ ,
![]()
![]() dпуа
dпуа
dРВ dпуа
где
хВ – величина линейного отклонения
ручки управления рулем высоты; РВ
– усилие, прикладываемое к руч-
ке, а представленные производные – градиенты хода ручки и усилия по перегрузке. Аналогичные показатели используются для оценки управ- ляемости по скорости, путевой (по рысканию) и поперечной (по крену) статической управляемости. Оцениваются также максимальные значе- ния отклонения рычагов управления, усилий, сама возможность балан- сировки на предельных режимах полета и т. п.
Другая группа показателей управляемости – характеристики ди- намической управляемости.
При оценке динамической управляемости рассматривается харак- тер реакции самолета на отклонение органов управления от их балан- сировочных значений для перехода от одного установившегося режи- ма полета к другому, для парирования возмущений и для выполнения существенно неустановившихся маневров (рис. 1.6).
5
1
t
2
4
3
Рис. 1.6. Переходные процессы различного характера:
1 – устойчивый колебательный; 2 – устойчивый апериодиче- ский; 3 – неустойчивый апериодический; 4 – безразличный;
5 – без демпфирования
Требования к количественным характеристикам (показателям) устойчивости и управляемости закреплены в документах «АВИАЦИ- ОННЫЕ ПРАВИЛА. Часть 23. НОРМЫ ЛЕТНОЙ ГОДНОСТИ
ГРАЖДАНСКИХ ЛЕГКИХ САМОЛЕТОВ» и других аналогичных до- кументах.
По требованиям, предъявляемым к показателям устойчивости и управляемости, самолеты в зависимости от их массы и основного назначения подразделяются на классы: маневренные самолеты, огра- ниченно маневренные и неманевренные со взлетной массой до 100 т и свыше 100 т. Вид требований может быть различен в зависимости от целевых задач самолета и этапов полета, их выполнение является не- обходимым условием допуска самолета к летной эксплуатации.
Разработка требований к показателям устойчивости и управляемости самолета данного класса проводится на основе анализа и обобщения полученных в летных испытаниях оценок самолетов летчиками. В последние годы при формировании требований широко применяется математическое моделирование процесса пилотирования самолета, что позволяет глубже понять процесс взаимодействия самолета с летчиком.
В процессе проектирования самолета выбор ряда проектных пара- метров (прежде всего таких, как параметры оперения и органов управ- ления, положение ЦМ самолета и др.), удовлетворяющих требованиям к характеристикам устойчивости и управляемости, проводится на ос- нове соответствующих расчетов. Показатели устойчивости и управля- емости детально проверяются и корректируются в процессе летных испытаний и доводки самолета.
Как показывает опыт, только средствами аэродинамической ком- поновки нельзя обеспечить для современного скоростного (особенно сверхзвукового) самолета статическую и динамическую устойчивость и хорошую управляемость во всем диапазоне высот и скоростей поле- та. Только включение в систему управления специальных автоматиче- ских устройств позволяет получить необходимые характеристики устойчивости и управляемости самолета.
Методическая литература
В печатном виде
-
Расчет аэродинамических характеристик летательного аппарата. Ч. 1: метод. руководство к выполнению курсового проекта «Аэродинамика» для 4 курса ФЛА / Новосиб. гос. техн. ун-т; сост.: С.Г. Деришев, А.В. Игнатьева, В.Л. Чемезов. – Новосибирск, 2008. – 34 с.
-
Петошин В.И. Расчет летных характеристик / Новосиб. электротехн. ин-т, 1990. – 25 с.
-
Петошин В.И. Исследование динамики продольного и бокового движе- ния самолета / Новосиб. электротехн. ин-т, 1993. – 22 с.
Саленко С.Д. Исследование на АВМ собственных свойств самолета в продольном короткопериодическом
 Жүктеу
Жүктеу 

 Жүктеу
Жүктеушағым қалдыра аласыз



 Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген
Бұл курс Қазақстан Республикасы Оқу-ағарту министрлігімен келісілген










